
La teoría de control es una disciplina de gran importancia práctica con un cuerpo teórico bien establecido para sistemas descritos por ecuaciones diferenciales ordinarias (ODEs). Sin embargo, muchos sistemas no pueden ser descritos de forma adecuada mediante ODEs y es necesario recurrir a ecuaciones en derivadas parciales (EDPs). Por ejemplo, sistemas fluidomecánicos, problemas de convección, flujos en canales, problemas de la magnetohidrodinámica, etc... Para este tipo de sistemas, la teoría de control está aún en proceso de desarrollo y existen aún grandes desafíos teóricos y prácticos que abordar.
Una herramienta potente procedente de la teoría de control no lineal, el backstepping, está demostrando ser de gran utilidad para abordar estos problemas. Sin embargo aún existen muchos problemas abiertos para los cuales la técnica de backstepping es una herramienta potencial de resolución. En particular, la ampliación de la técnica a sistemas acoplados, a dos o más dimensiones o a geometrías generales está aún pendiente de desarrollo.
Algunas publicaciones seleccionadas:
El rendezvous o encuentro en órbita de vehículos espaciales es un problema de gran importancia práctica en numerosas misiones espaciales. Por ejemplo, el programa Apollo que culminó en la llegada del hombre a la Luna hubiera sido imposible sin el desarrollo de técnicas para resolver este problema de forma eficaz.
La principal dificultad del problema consiste en garantizar un rendezvous seguro sin desperdiciar combustible. Multitud de técnicas de optimización y control se pueden aplicar para lograr el objetivo del rendezvous. Sin embargo los sistemas automáticos actuales se caracterizan por ser pesados y costosos y aún es un reto desarrollar un sistema de bajo coste y consumo para el rendezvous de pequeños satélites con grandes satélites o estaciones espaciales.
Algunas publicaciones seleccionadas:

La era de los vehículos aéreos no tripulados (UAVs) está a la vuelta de la esquina, con innumerables aplicaciones tanto civiles como militares. Una parte fundamental de estos vehículos es un sistema de guiado, control y navegación (GNC) capaz de desarrollar cualquier misión dentro de las capacidades de la aeronave. Si bien existen sistemas comerciales capaces de abordar todos estos aspectos, se suelen caracterizar por su elevado precio, y por requerir un conocimiento muy detallado de la aerodinámica del vehículo, lo que usualmente requiere multitud de ensayos en túnel de viento y en vuelo. Es posible con el hardware disponible en la actualidad desarrollar algoritmos adaptativos capaces de funcionar con cualquier aeronave sin apenas conocimiento a priori de su aerodinámica. Por otro lado, los sistemas actuales se degradan considerablemente en presencia de viento y/o incertidumbres; se pueden desarrollar algoritmos de guiado predictivos capaces de mitigar estos problemas.
Algunas publicaciones seleccionadas:
En sistemas reales, siempre está presente la incertidumbre. Ya sea en forma de errores de medida, desconocimiento de la dinámica exacta o de parámetros del sistema, errores en las condiciones iniciales, o varias de estas situaciones a la vez, es inevitable que en la práctica aparezca incertidumbre.
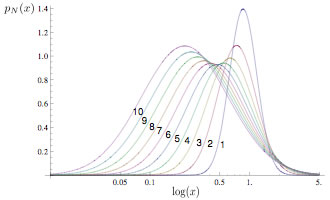
No obstante en muchos casos los parámetros no conocidos se pueden modelar usando la estadística, empleando funciones de distribución. Eso provoca que las ecuaciones que describen la dinámica del sistema (sean continuas o discretas) pasen a ser ecuaciones diferenciales estocásticas.
Existe toda una teoría que permite, a partir de estos modelos estocásticos, determinar la evolución del sistema, no de una forma exacta sino de una forma aproximada (como una función de distribución que evoluciona en el tiempo), y cuantificar como aumenta (o disminuye) la incertidumbre del estado del sistema.
Algunas publicaciones seleccionadas:

El número de satélites de observación de la Tierra (EOSs) está en constante aumento debido a la creciente demanda de imágenes de nuestro planeta, cada vez con más resolución y en muchos casos requeridas con la mayor urgencia posible (por ejemplo en casos de catástrofe).
La gestión de estos recursos se ha hecho mayoritariamente de forma manual y considerando satélites individuales. Sin embargo, existe en la actualidad un auténtico mercado que permite combinar las observaciones de distintos satélites para conseguir el objetivo requerido. Realizar esta selección de forma óptima teniendo en cuenta los distintos requisitos de cada misión requiere el desarrollo de planificadores óptimos capaces de tener en cuenta la geometría, la mecánica orbital, y las distintas preferencias de los usuarios.
Existen asimismo otros problemas de planificación óptima como por ejemplo la asignación de satélites a antenas (particularmente cuando existe un gran número de ambos) o la gestión de los distintos modos de observación de los satélites ágiles.
Algunas publicaciones seleccionadas:
© 2007-2014 Rafael Vazquez Valenzuela