 Universidad de Sevilla, Departamento de Ingeniería Aeroespacial
Universidad de Sevilla, Departamento de Ingeniería Aeroespacial


Vuelta a la página de Líneas de investigación - Return to Research Lines Page
PROJECT EMERGENTIA
Desarrollo de una Aeronave Convertible No-Tripulada para Despliegue Rápido y Eficiente en Situaciones de Emergencia
DevElopment of an unManned convERtible aircraft for rapid and efficient deployment in emerGENcy situaTIons
Return to EMERGENTIA Project
PUBLICATIONS & DISSEMINATION OF KNOWLEDGE
A compilation of the publications related to the EMERGENTIA Project are collected in this page. The list of publications include:
- Journal Articles (4)
- Thesis (13)
- Master Thesis (13)
- Congress (34)
- PhD (On Going) (1)
Publications are organized according to the working Packages (WP)
WP0 - General
Congress
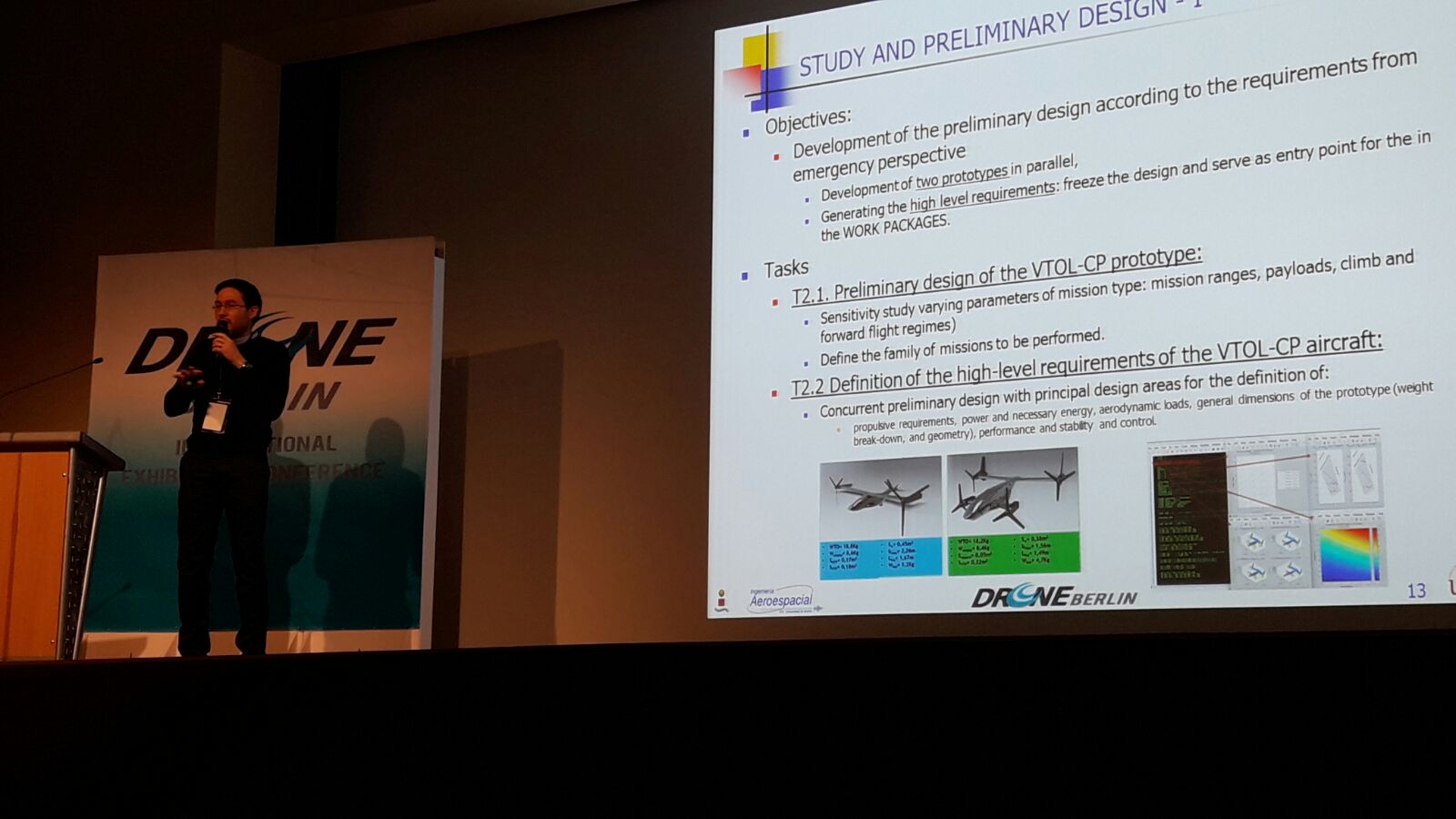
- “Development of Unmanned Convertible Aircraft for Rapid and Efficient Deployment in Emergency Situations: Project EMERGENTIA,”, S. Esteban, C. Bordons, X. Blasco, L. Buss-Becker, A. Cuerva, C. Castillo, S. García-Nieto, J. Justo, O. López, J. Macías, J. Martínez, J.L. Mora, J. Normey, M. Ortega, G. Raffo, M. Vargas, DRONE Berlin 2017, Berlin, Germany, September 21-22 2017.
- “Desarrollo de una Aeronave Convertible No-Tripulada para Despliegue Rápido y Eficiente en Situaciones de Emergencia: Proyecto EMERGENTIA”, S. Esteban, C. Bordons, X. Blasco, L. Buss-Becker, A. Cuerva, C. Castillo, S. García-Nieto, J. Justo, O. López, J. Macías, J. Martínez, J.L. Mora, J. Normey, M. Ortega, G. Raffo, M. Vargas, IV Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil – CivilDRON’18, ETSII, Madrid, Spain, Fundación de la Energía de la Comunidad de Madrid, January 24-25th, 2018. ISBN: 978-84-697-8936-0.
WP1 DEFINITION OF OPERATIONAL PROTOCOLS IN SEARCH AND RESCUE (SAR) MISSIONS
Master Thesis
- "Drones en la Gestión de Crisis," Andrades González, Ismael, Master Thesis Defense, Master de Enfermería de Urgencias, Emergencias, Catástrofes y Acción Humanitaria, Universidad de Sevilla, 2015. Advisor: Juana Macías Seda, Co-tutor: Juan González Escalada
- "Revisión Sistemática sobre la Aplicabilidad de los Vehículos Aéreos no Tripulados en Emergencias y Catástrofes," De Lizaur Salcedo, Gonzalo, Master Thesis Defense, Master de Enfermería de Urgencias, Emergencias, Catástrofes y Acción Humanitaria, Universidad de Sevilla, 2015. Advisor: Juana Macías Seda
- "Estudio de los protocolos de operación en misiones de búsqueda y rescate con uso de drones," Fernandez Ramirez, Ana, Master Thesis Defense, Master de Enfermería de Urgencias, Emergencias, Catástrofes y Acción Humanitaria, Universidad de Sevilla, 2017. Advisors: Sergio Esteban Roncero y Dª. Juana Macías Seda.
Congress
- “Aplicabilidad de los drones en emergencias y catástrofes”, Andrade González, Ismael; JUANA MACIAS SEDA; Gonzalez-escalada-alvarez, Juan; Garrido-fages,Carmen; Alvarez -macías, Alejandro; S. Esteban, XX Congreso Regional Sociedad Española de Medicina de Emergencias Sanitarias, 5-6 Noviembre 2015, Sevilla, España.
- “Nuevas tecnologías en ciencias de la salud: percepción de los profesionales sanitarios acerca del uso de drones en emergencias,” Ismael Andrades González, Luis Miguel Arroyo Ruiz, Alba M.ª Ruiz Castillo, Alberto Coronel Martínez, Sergio Esteban Roncero and Juana Macías Seda, Jornadas Internacionales de Investigación e Innovación en Ciencias de la Salud Hacia la Excelencia en Resultados de Salud, Enfermería Clínica, Enferm Clin. 2017;27(Espec Congr 2):36, ISSN: 1130-8621, IF 0.216 (SJR), 0,37 (CITESCORE 2017), 0,383 (SNIP).
WP2 STUDY AND PRELIMINARY DESIGN DEFINITION OF DESIGN REQUIREMENTS AND OPERATIONAL PROTOCOLS IN SAR MISSIONS
Master Thesis
- "Diseño y Desarrollo Preliminar de una Plataforma “UAV” para Misiones de Búsqueda y Rescate", Jorge Carreño del Pino, Thesis Defense, Ingeniería Aeronáutica, Universidad de Sevilla, 2017, Advisor: Sergio Esteban
Congress
- “Project Based Learning Methodologies Applied to Large Groups of Students: Airplane Design in a Concurrent Engineering Context”, Sergio Esteban, Manuel Ruiz Arahal, 3rd IFAC Workshop on Internet Based Control Education (IBCE 2015), Volume 48, Issue 29, pp 194-199, Elsevier
- “Development of Unmanned Convertible Aircraft for Rapid and Efficient Deployment in Emergency Situations: Project EMERGENTIA,”, S. Esteban, C. Bordons, X. Blasco, L. Buss-Becker, A. Cuerva, C. Castillo, S. García-Nieto, J. Justo, O. López, J. Macías, J. Martínez, J.L. Mora, J. Normey, M. Ortega, G. Raffo, M. Vargas, DRONE Berlin 2017, Berlin, Germany, September 21-22 2017.
- “Desarrollo de una Aeronave Convertible No-Tripulada para Despliegue Rápido y Eficiente en Situaciones de Emergencia: Proyecto EMERGENTIA”, S. Esteban, C. Bordons, X. Blasco, L. Buss-Becker, A. Cuerva, C. Castillo, S. García-Nieto, J. Justo, O. López, J. Macías, J. Martínez, J.L. Mora, J. Normey, M. Ortega, G. Raffo, M. Vargas, IV Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil – CivilDRON’18, ETSII, Madrid, Spain, Fundación de la Energía de la Comunidad de Madrid, January 24-25th, 2018. ISBN: 978-84-697-8936-0.
WP3 AERODYNAMIC STUDY
Master Thesis
Aerodynamic
- “Estudio de una herramienta para el diseño preliminar aerodinámico de aviones orientada a su uso académico: openvsp,” Alfonso Sancho Molina, Master Thesis Defense, Ingeniería Aeronáutica, Universidad de Sevilla, 2018, Advisor: Sergio Esteban
Thesis
Propulsive
- “Desarrollo de un Equipo para la caracterización en
Túnel de Viento de Plantas Propulsoras de Motor
eléctrico y Hélice con ángulo de incidencia variable,” Raimundo Blanco Hacar, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2015, Advisor: Sergio Esteban
- "Ensayos de planta propulsora de motor eléctrico y hélice en túnel de viento con ángulo de incidencia variable," Daniel pinazo Jiménez, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2016. Advisor: Sergio Esteban
- "Ensayos de Planta Propulsora de Cabeza de Helicóptero en Túnel de Viento con Ángulo de Cabeceo e Incidencia Variable para Velocidades de Vuelo de Transición entre Vuelo de Avance y Vuelo Vertical", David Barea Vizuete, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2017, Advisor: Sergio Esteban
WP4: FLIGHT MECHANIC STUDY
Master Thesis
- "Modeling and Control of a Tiltrotor Unmanned Aerial Vehicle for Path Tracking", Rodrigo Donadel. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. 2015, Advisor: Guilherme Vianna Raffo
- "Modelado y Simulación de un Vehículo Aéreo Convertible para Misiones de Búsqueda y Rescate," Juan Diego Sánchez Mingorance, Master Thesis Defense, Ingeniería Aeronáutica, Universidad de Sevilla, 2018, Advisor: Sergio Esteban
Congress
- "Assessing the use of Simulink on the Development Process of an Unmanned Aerial Vehicle," GONCALVES, F. S. ; DONADEL, R. ; BECKER, L. B. ; RAFFO, G. V. . In: Workshop on Design, Modeling and Evaluation of Cyber Physical Systems, 2013, Philadelphia. 3th Workshop on Design, Modeling and Evaluation of Cyber Physical Systems (CyPhy'13), 2013. p. 1-6.
- "Modeling and Control of a Tiltrotor UAV for Path Tracking," DONADEL, R. ; RAFFO, G. V. ; BECKER, L. B. . In: 19th World Congress - IFAC'14, 2014, Cape Town. 19th World Congress - IFAC'14, 2014. p. 3839-3844.
- "DESENVOLVIMENTO DE UM AMBIENTE DE SIMULAÇÃO DE VANTS TILT-ROTOR PARA TESTES DE ESTRATÉGIAS DE CONTROLE," LARA, A. V. ; REGO, B. S. ; RAFFO, G.V. ; ARIAS, J. In: XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017, Porto Alegre. XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017. p. 1-7
WP5: STRUCTURE STUDY
Thesis
- “Estudio numérico preliminar de la estructura en material compuesto para una aeronave tilt-rotor,” Miguel Peña Herrero, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2016, Advisor: Jesús Justo Estebaranz and José Antonio Reinoso Cuevas.
WP6: DEVELOPMENT OF ENERGY GENERATION AND STORAGE SYSTEMS
Thesis
- “Integración de Pilas de Combustible para Propulsión en una Aeronave,” Juan Ramón Parra Villar, hesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2016, Advisor: Carlos Bordons Alba
WP7: DEVELOPMENT OF HIGH EFFICIENCY EMBEDDED ELECTRONICS SYSTEMS
Journals
- “Development of an Emergency Radio Beacon for Small Unmanned Aerial Vehicles”, J.M. Martinez-Heredia, Zulema Garcia, Jose Luis Mora-Jimenez, Sergio Esteban, Francisco Gavilan, IEEE Access. 2018. Vol. 6. Pag. 21570-21581. ISSN: 2169-3536. DOI:10.1109/ACCESS.2018.2826918;
Thesis
- "Diseño y construcción de un sistema de adquisición de datos de motores hélice para experimentos en túnel de viento," Lidia Parrilla, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2016, Advisor: Juana Martínez Heredia.
- “Estudio y Modelado del Control de motores Brushless poara una aeronave UAV VTOL,” Laura María González Ruiz, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2017, Advisor: Juana Martínez Heredia.
- “Estudio de la tecnología GaN y análisis comparativo de transistores GaN, Si y SiC,” José Antonio Moreno Pérez, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2018, Advisor: Juana Martínez Heredia.
- “Desarrollo de convertidor con tecnología GaN para alimentación de motores en un UAV VTOL,” Alejandro Remujo Castro, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2018, Advisor: Juana Martínez Heredia
- “Desarrollo de Convertidor DC - DC con Tecnología de Nitruro de Galio para Aplicación en UAV,” Joaquín Soriano López, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2018, Advisor: Juana Martínez Heredia
- “Estudio, Modelado y Comparación de Estrategias de Control de un Motor BLDC,” Dunia López Navas, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2018, Advisor: Juana Martínez Heredia
- “Optimización del acoplamiento entre hélice y motor eléctrico de un UAV VTOL,” Diego Manzano Delgado, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2018, Advisor: Juana Martínez Heredia
WP8: DEVELOPMENT OF AUTONOMOUS STRATEGIES FOR CONTROL AND GUIDANCE
Journals
- "Suspended Load Path Tracking Control Strategy Using a Tilt-Rotor ," SANTOS, M. A. ; REGO, B. S. ; RAFFO, G. V. ; FERRAMOSCA, A. . UAV. JOURNAL OF ADVANCED TRANSPORTATION, v. 2017, p. 1-22, 2017.
- "Suspended Load Path Tracking Control Strategy using a Tilt-rotor," SANTOS, M. A. ; REGO, B. S. ; RAFFO, G V ; FERRAMOSCA, A.UAV. JOURNAL OF ADVANCED TRANSPORTATION, 2017
- "Suspended Load Path Tracking Control Using a Tilt-rotor UAV Based on Zonotopic State Estimation," REGO, B. S. ; RAFFO, G.V. JOURNAL OF THE FRANKLIN INSTITUTE-ENGINEERING AND APPLIED MATHEMATICS
 , 2018.
, 2018.
PhD (on going)
- "Robust Control Strategies for Convertible Unmanned Aerial Vehicles ," Daniel Neri Cardoso, Doctorado em Programa de Pós-Graduação em Engenharia Elétrica - Universidade Federal de Minas Gerais, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior Advisor:
Guilherme Vianna Raffo, Co-Advisor
Sergio Esteban.
Master Thesis
- "Control Strategies of a Tilt-rotor UAV for Load Transportation," Marcelino Mendes de Almeida Neto. 2014. Dissertação (Mestrado em Programa de Pós-Graduação em Engenharia Elétrica) - Universidade Federal de Minas Gerais, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo."
- "Projeto da Arquitetura de Software Embarcado de um Veículo Aéreo Não Tripulado," Fernando Silvano Gonçalves. 2014. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
- "Modeling and Control of a Tiltrotor Unmanned Aerial Vehicle for Path Tracking," Rodrigo Donadel. . 2015. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
- Predictive Control Strategies for Unmanned Aerial Vehicles in Cargo Transportation Tasks," Richard Alfonso Andrade Alfaro. 2016. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
- "Path Tracking Control of a Suspended Load using a Tilt-Rotor UAV," Brenner Santana Rêgo. 2016. Dissertação (Mestrado em Programa de Pós-Graduação em Engenharia Elétrica) - Universidade Federal de Minas Gerais, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
- "Adaptive Control Strategies for Improved Forward Flight of a Tilt-Rotor UAV," Daniel Neri Cardoso. 2016. Dissertação (Mestrado em Programa de Pós-Graduação em Engenharia Elétrica) - Universidade Federal de Minas Gerais, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
Thesis
- "Desarrollo de estrategias de control avanzadas para el control de vehículos aéreos no tripulado," Luis García-Baquero, Thesis Defense, Grado en Ingeniería Aeroespacial, Universidad de Sevilla, 2018, Advisor: Sergio Esteban
Congress
- "Small scale UAV with birotor configuration," GONCALVES, F.S. ; BODANESE, J. P. ; DONADEL, R. ; RAFFO, G. V. ; NORMEY-RICO, J. E. ; BECKER, L. B. In: 2013 International Conference on Unmanned Aircraft Systems (ICUAS), 2013, Atlanta. 2013 International Conference on Unmanned Aircraft Systems (ICUAS). p. 761-768
- "Modeling and Control of a Tiltrotor UAV for Path Tracking," DONADEL, R. ; RAFFO, G. V. ; BECKER, L. B. In: 19th World Congress - IFAC'14, 2014, Cape Town. 19th World Congress - IFAC'14, 2014. p. 3839-3844.
- "Robust State Estimation for UAVs. A comparison study among a deterministic and a stochastic approach.," ALMEIDA, M. M. ; SCHREIBER, L. ; RAFFO, G. V. In: XX Congresso Brasileiro de Automática 2014, 2014, Belo Horizonte. XX Congresso Brasileiro de Automática 2014, 2014.
- "Full Control of a TiltRotor UAV for Load Transportation.," ALMEIDA, M. M. ; DONADEL, R. ; RAFFO, G. V. ; BECKER, L. B. In: XX Congresso Brasileiro de Automática 2014, 2014, Belo Horizonte. XX Congresso Brasileiro de Automática 2014, 2014.
- "Path Tracking Control of a Small Scale Tiltrotor Unmmaned Aerial Vehicle,"DONADEL, R. ; ALMEIDA, M. M. ; RAFFO, G. V. ; BECKER, L. B. In: XX Congresso Brasileiro de Automática 2014, 2014, Belo Horizonte. XX Congresso Brasileiro de Automática 2014, 2014.
- "Nonlinear Balance Control of an Inverted Pendulum on a Tilt-rotor UAV," ALMEIDA, M. M. ; RAFFO, G V . In: ACNAAV'15 IFAC Workshop on Advanced Control and Navigation for Autonomous Aerospace Vehicles, 2015, Seville. Proc. of 2015 IFAC Workshop on Advanced Control and Navigation for Autonomous Aerospace Vehicles, 2015. p. 168-173.
- ALMEIDA, M. M. ; RAFFO, G V . Nonlinear Control of a TiltRotor UAV for Load Transportation. In: 11th IFAC Symposium on Robot Control, 2015, Salvador. Proc. of the 11th IFAC Symposium on Robot Control, 2015. p. 234-239.
- "Model Predictive Control for Path Tracking of a Tilt-Rotor UAV," ANDRADE, R. ; RAFFO, G.V. ; NORMEY-RICO, J. E. . In: Simpósio Brasileiro de Automação Inteligente SBAI-DINCON, 2015, Natal. XII Simpósio Brasileiro de Automação Inteligente SBAI-DINCON, 2015. p. 1507-1512.
- "Model predictive control of a tilt-rotor UAV for load transportation," ANDRADE, RICHARD ; RAFFO, Guilherme V. ; NORMEY-RICO, JULIO E. In: 2016 European Control Conference (ECC), 2016, Aalborg. 2016 European Control Conference (ECC). p. 2165-2170.
- "Suspended load path tracking control based on zonotopic state estimation using a tilt-rotor UAV," REGO, BRENNER S. ; RAFFO, Guilherme V. In: 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), 2016, Rio de Janeiro. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). p. 1445-1451.
- "ADAPTIVE CONTROL OF A TILT-ROTOR UAV IN LOAD TRANSPORTATION TASKS - A LMI BASED APPROACH," SANTOS, M. A. ; RAFFO, G.V. In: XXI Congresso Brasileiro de Automática - CBA2016, 2016, Vitória. XXI Congresso Brasileiro de Automática - CBA2016, 2016. p. 1-6.
- "PATH TRACKING CONTROL BASED ON GUARANTEED STATE ESTIMATION FOR A TILT-ROTOR UAV," REGO, B. S. ; RAFFO, G.V. In: XXI Congresso Brasileiro de Automática - CBA2016, 2016, Vitória. XXI Congresso Brasileiro de Automática - CBA2016, 2016. p. 1241-1246.
- "MODELING AND CONTROL OF A TILT-ROTOR UAV WITH IMPROVED FORWARD FLIGHT," Neri, D. ; RAFFO, G.V. ; ESTEBAN, S. In: XXI Congresso Brasileiro de Automática - CBA2016, 2016, Vitória. XXI Congresso Brasileiro de Automática - CBA2016, 2016. p. 2473-2478.
- "Managing CPS Complexity: Design Method for Unmanned Aerial Vehicles," GONCALVES, F. S. ; RAFFO, G.V. ; BECKER, L. B. . In: The 1st IFAC Conference on CyberPhysical & Human-Systems, 2016, Florianópolis. Proc. of the 1st IFAC Conference on CyberPhysical & Human-Systems, 2016. p. 136-141.
- "Suspended Load Path Tracking by a Tilt-rotor UAV," REGO, B. S. ; RAFFO, G.V. In: The 1st IFAC Conference on CyberPhysical & Human-Systems, 2016, Florianópolis. Proc. of the 1st IFAC Conference on CyberPhysical & Human-Systems, 2016. p. 229-234.
- "Path tracking Model Predictive Control of a Tilt-rotor UAV carrying a suspended load," SANTOS, MARCELO A. ; RAFFO, Guilherme V. In: 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), 2016, Rio de Janeiro. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). p. 1458-1463.
- "A robust adaptive mixing control for improved forward flight of a tilt-rotor UAV," CARDOSO, DANIEL NERI ; RAFFO, Guilherme V. ; ESTEBAN, SERGIO In: 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), 2016, Rio de Janeiro. 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC). p. 1432-1437.
- "DESENVOLVIMENTO DE UM AMBIENTE DE SIMULAÇÃO DE VANTS TILT-ROTOR PARA TESTES DE ESTRATÉGIAS DE CONTROLE," LARA, A. V. ; REGO, B. S. ; RAFFO, G.V. ; ARIAS, J. In: XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017, Porto Alegre. XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017. p. 1-7
- "A MULTI-CORE SOFTWARE DESIGN OF A MODEL PREDICTIVE CONTROL FOR A TILT-ROTOR UAV," MIRANDA, G. M. T. ; MACHADO, L. M. F. ; ARIAS, J. ; RAFFO, G.V. In: XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017, Porto Alegre. XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017. p. 1-7.
- "A Discrete Robust Adaptive Control of a Tilt-rotor UAV for an Enlarged Flight Envelope," SANTOS, M. A. ; Neri, D. ; REGO, B. S. ; RAFFO, G. ; ESTEBAN, S. In: 56th IEEE Conference on Decision and Control, 2017, Melbourne. Proc. of the 56th IEEE Conference on Decision and Control, 2017. p. 1-6.
- "Tube-Based MPC with Nonlinear Control for Load Transportation Using a UAV," SANTOS, M. A.; FERRAMOSCA, A.; RAFFO, G. V. In: Joint 9th IFAC Symposium on Robust Control Design and 2nd IFAC Workshop on Linear Parameter Varying System, 2018, Florianópolis.
9th IFAC Symposium on Robust Control Design. , 2018. p.649 - 655
- “Singular Perturbation Control for the Longitudinal and Lateral-Directional Flight Dynamics of a UAV”, L. García-Vaquero, S. Esteban, G. V. Raffo, In: 2018 IFAC Aerospace Controls Workshop - Networked & Autonomous Air & Space Systems, 2018, Santa Fé., NAAS 2018. , 2018. v.51. issues 12, p.124 – 129, https://doi.org/10.1016/j.ifacol.2018.07.099
- "Path Tracking Control with State Estimation based on Constrained Zonotopes for Aerial Load Transportation," REGO, B. S.; RAIMONDO, D. M.; RAFFO, G. V. In: 57th IEEE Conference on Decision and Control, 2018, Miami Beach. 57th IEEE Conference on Decision and Control. , 2018. p.1 - 6
WP9: "HARDWARE-IN-THE-LOOP" INTEGRATION AND SIMULATIONS
Thesis
- Projeto da Arquitetura de Software Embarcado de um Veículo Aéreo Não Tripulado. Fernando Silvano Gonçalves, 2014. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
Congress
- "Assessing the use of Simulink on the Development Process of an Unmanned Aerial Vehicle," GONCALVES, F. S. ; DONADEL, R. ; BECKER, L. B. ; RAFFO, G. V. In: Workshop on Design, Modeling and Evaluation of Cyber Physical Systems, 2013, Philadelphia. 3th Workshop on Design, Modeling and Evaluation of Cyber Physical Systems (CyPhy'13), 2013. p. 1-6.
- "Wireless Communication Infrastructure for a Short-Range Unmanned Aerial," BODANESE, J.P. ; ARAUJO, G.M. DE ; STEUP, C. ; RAFFO, G.V. ; BECKER, L.B. In: 2014 28th International Conference on Advanced Information Networking and Applications Workshops (WAINA), 2014, BC. 2014 28th International Conference on Advanced Information Networking and Applications Workshops. p. 492-497.
- "RBESP: Reliable and best effort stack protocol for UAV collaboration with WSN,"BODANESE, J. P. ; DE ARAUJO, G. M. ; RAFFO, G. V. ; BECKER, L. B. In: 2014 12th IEEE International Conference on Industrial Informatics (INDIN), 2014, Porto Alegre RS. 2014 12th IEEE International Conference on Industrial Informatics (INDIN). p. 382-387"VANT Autônomo Capaz de Comunicar com uma Rede de Sensores Sem Fio," GONCALVES, F.S. ; ANDRADE, R. ; WOYAKEWICZ, V. ; PEREIRA, P. J. ; BECKER, L.B. ; RAFFO, G.V. . In: X Congresso Brasileiro de Agroinformática - SBIAgro, 2015, 2015, Ponta Grossa. X Congresso Brasileiro de Agroinformática - SBIAgro, 2015, 2015. p. 1-11. .
- "DESENVOLVIMENTO DE UM AMBIENTE DE SIMULAÇÃO DE VANTS TILT-ROTOR PARA TESTES DE ESTRATÉGIAS DE CONTROLE," LARA, A. V. ; REGO, B. S. ; RAFFO, G.V. ; ARIAS, J. In: XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017, Porto Alegre. XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017. p. 1-7
- " Hardware-in-the-loop simulation environment for testing of tilt-rotor UAV's control strategies," LARA, A. V.; NASCIMENTO, I. B. P.; ARIAS, J.; BECKER, L. B.; RAFFO, G.V. In: XXII Congresso Brasileiro de Automática - CBA2018, 2018, João Pessoa. XXII Congresso Brasileiro de Automática. , 2018. p.1 - 7
WP10: FLIGHT TESTS FOR THE DEMOSTRATOR
© 2018 Sergio Esteban Roncero: contact sesteban@us.es