 Universidad de Sevilla, Departamento de Ingeniería Aeroespacial
Universidad de Sevilla, Departamento de Ingeniería Aeroespacial


Vuelta a la página de Líneas de investigación - Return to Research Lines Page
PROJECT EMERGENTIA
Desarrollo de una Aeronave Convertible No-Tripulada para Despliegue Rápido y Eficiente en Situaciones de Emergencia
DevElopment of an unManned convERtible aircraft for rapid and efficient deployment in emerGENcy situaTIons
Return to EMERGENTIA Project
WP4. FLIGHT MECHANIC STUDY
Responsibles: ACT
Participants:ACT, OLG, CJG, SER.
Objectives:
- Parametric analysis on the different design options of aircraft flight mechanics with special emphasis on the complexity of transition maneuvers.
Subtasks
- T4.1. Parametric analysis on balanced flight design options.
- T4.2. Parametric linear analysis of the stability and response to the control of the different configurations.
- T4.3. Parametric non-linear analysis of response to command.
- T4.4. Computational simulation of the flight mechanics of the two missions: It is expected that the results will be reevaluated in the last quarters as a function of wind tunnel results obtained in WP3.
- T4.5 Validation of performances with flight test results: Using the performance data obtained during the flight test phase, validate the results obtained in the theoretical studies to facilitate the development tasks of future prototype
Feasibility and Contingency Plan:
- For the parametric study of the flight actions, the software of simulation of the flight mechanics of rotary wing aircraft, and wind turbine generators (WTToolBox), both available as free software and developed by the team of researchers of the UPM that can not concur to this call, but as previously mentioned, is totally committed to the project.
- The modeling and optimization of rotors, the modeling and optimization of rotors, operating in an environment with turbulent atmospheric wind, and in this way contrast with the results obtained in WP3.
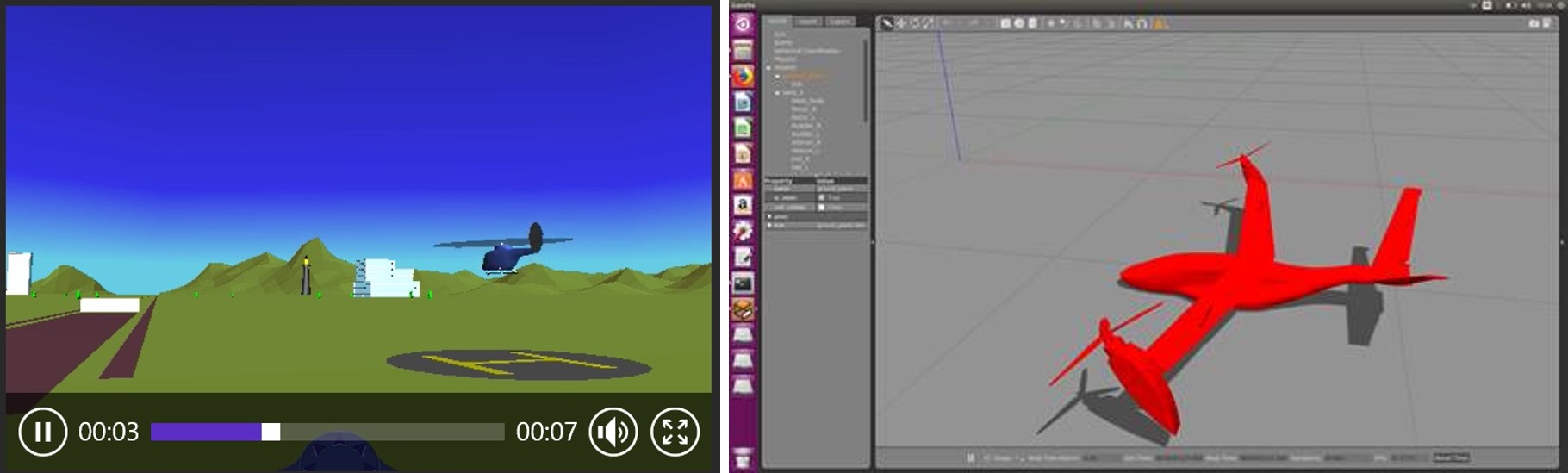
- HEROES
- HEROES allows addressing problems of balancing, linear analysis of stability and response to command, as well as nonlinear analysis of flight dynamics.
- HEROES is oriented to carry out parametric analysis with flexibility in which the design options of the aircraft are varied, so it is an ideal capacity to approach the analysis of the design required by the present project.
- In particular, the HEROES tool has been validated successfully with the results of the flight test campaign of the Bo105, Super Puma and Lynx helicopters described in (AGARD) and has been successfully contrasted with other dynamics modeling tools of the flight as HELISIM, or CAMRAD.
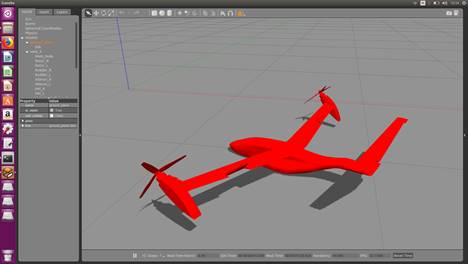
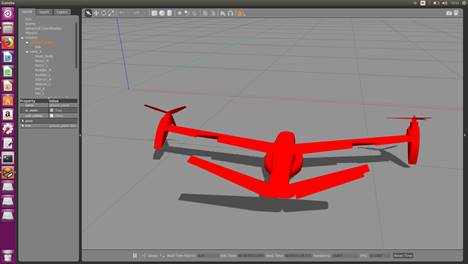
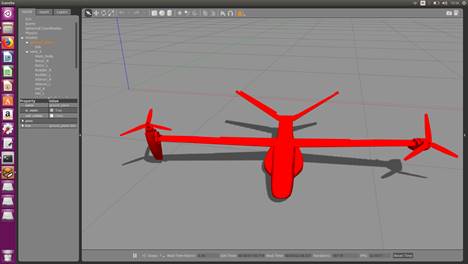
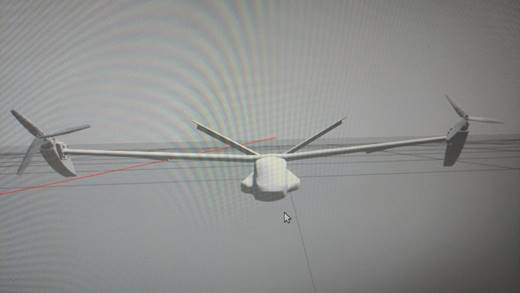
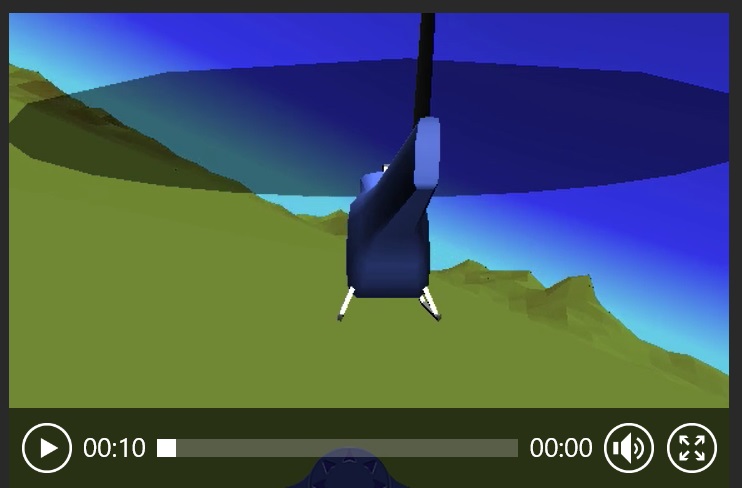
- GAZEBO
- Robotic simulator Gazebo, along with the framework of robotic applications ROS (Robotic Operating System). A graphical user interface developed to allow a detailed configuration of simulations, including the aircraft model to be simulated and its physical parameters, available instrumentation, the control strategy to be evaluated, and also scenario.
- The software has been developed by the Universidade Federal de Mina Gerais (UFMG), under the supervisión of researcher GVR.
- The researcher SER is professor of introduction to the aerospace engineering of the first degree of degree in aerospace engineering; flight mechanics of the fourth grade specialty aerospace specialty vehicles in aerospace engineering, and aircraft design all of the Aerospace Engineering Degree in its Aircraft specialty.
- Additionally, he is a professor of aircraft design and aircraft systems for the first year of the master's degree in Aeronautical Engineering and helicopters of the second course of the master's degree in Aeronautical Engineering, all in the US.
- He is the director of a doctoral thesis related to the development of UAVs.
- Professor SER has extensive experience in the study and manufacture of aeronautical structures using composite materials.
- This experience has been acquired both in the academic field and in the field of projects with companies (see projects with companies section B).
Publications:
- Cuerva Tejero, Alvaro, y otros, y otros. Teoría de los Helicópteros. Madrid : Garceta, 2012. 978-84-1545-221-8.
- Cuerva Tejero, Alvaro, López García, Oscar y Gallego Castillo, Cristóbal José. Diseño Conceptual de Aerogeneradores. s.l. : Escuela Técnica Superior de Ingenieros Aeronáuticos, 2013.
- Model of the aerodynamic behavior of a. Nadal Mora, Vicente, Sanz Andrés, Angel Pedro y Cuerva Tejero, Alvaro. 6, s.l. : AIAA, 2006, Journal of Aircraft, Vol. 43. 0021-8669.
- An engineering modification of the blade element momentum equation for vertical descent: An autorotation case study. Cuerva Tejero, Alvaro, y otros, y otros. 4, 2006, Jornal of the American Helicopter Society, Vol. 51, págs. 349-354. ISSN 0002-8711.
- On the use of calculus of variations to the shape of hovering rotors of minimum power and its application to micro air vechicles. López García, Oscar, Cuerva Tejero, Alvaro y Esteban, Sergio. G5, s.l. : Institution of Mechanical Engineers, 2012, Journal of Aerospace Engineering. Part G., Vol. 226, págs. 574-588
Master Thesis
- "Modeling and Control of a Tiltrotor Unmanned Aerial Vehicle for Path Tracking", Rodrigo Donadel. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. 2015, Advisor: Guilherme Vianna Raffo
- "Modelado y Simulación de un Vehículo Aéreo Convertible para Misiones de Búsqueda y Rescate," Juan Diego Sánchez Mingorance, Master Thesis Defense, Ingeniería Aeronáutica, Universidad de Sevilla, 2018, Advisor: Sergio Esteban
Congress
- "Assessing the use of Simulink on the Development Process of an Unmanned Aerial Vehicle," GONCALVES, F. S. ; DONADEL, R. ; BECKER, L. B. ; RAFFO, G. V. . In: Workshop on Design, Modeling and Evaluation of Cyber Physical Systems, 2013, Philadelphia. 3th Workshop on Design, Modeling and Evaluation of Cyber Physical Systems (CyPhy'13), 2013. p. 1-6.
- "Modeling and Control of a Tiltrotor UAV for Path Tracking," DONADEL, R. ; RAFFO, G. V. ; BECKER, L. B. . In: 19th World Congress - IFAC'14, 2014, Cape Town. 19th World Congress - IFAC'14, 2014. p. 3839-3844.
- "DESENVOLVIMENTO DE UM AMBIENTE DE SIMULAÇÃO DE VANTS TILT-ROTOR PARA TESTES DE ESTRATÉGIAS DE CONTROLE," LARA, A. V. ; REGO, B. S. ; RAFFO, G.V. ; ARIAS, J. In: XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017, Porto Alegre. XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017. p. 1-7
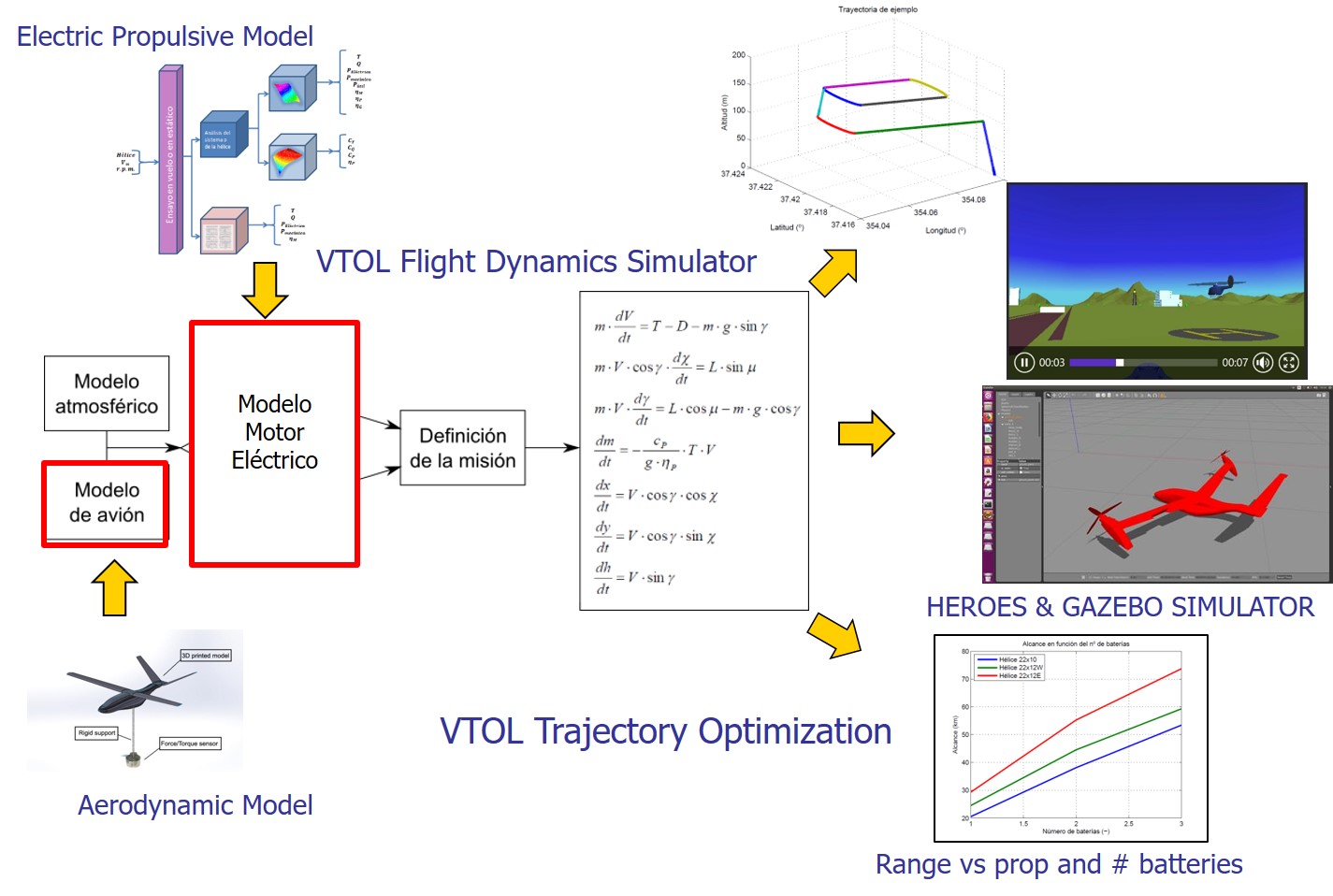
SIMULATOR PRELIMINARY ARCHITECTURE
GAZEBO


HEROES

© 2018 Sergio Esteban Roncero: contact sesteban@us.es