 Universidad de Sevilla, Departamento de Ingeniería Aeroespacial
Universidad de Sevilla, Departamento de Ingeniería Aeroespacial


Vuelta a la página de Líneas de investigación - Return to Research Lines Page
PROJECT EMERGENTIA
Desarrollo de una Aeronave Convertible No-Tripulada para Despliegue Rápido y Eficiente en Situaciones de Emergencia
DevElopment of an unManned convERtible aircraft for rapid and efficient deployment in emerGENcy situaTIons
Return to EMERGENTIA Project
WP8. "HARDWARE-IN-THE-LOOP" INTEGRATION AND SIMULATIONS
WP8. "HARDWARE-IN-THE-LOOP" INTEGRATION AND SIMULATIONS
|
Responsibles: GVR
Participants: GVR, JMH, MOL, MVV, LBB, JNR, JMH, XBF, SGNR, SER
Objectives:
- Objectives: development of the cyberphysical system, which will later be integrated in an advanced simulator forming a HIL simulation platform.
- Such a platform must sequentially embark on the various technological demonstrators developed in the Phase I design discussed in this project.
- The HIL system will allow to minimize risks that may appear during the integration phase through the correct verification of the operation of the systems operating autonomously.
- To this end, the various technological demonstrators developed throughout the project will gradually be integrated
Subtasks
- T8.1. Design of the embedded system for UAVs: the hardware and software architecture of the embedded system will be co-designed, allowing the optimization of the set with respect to computational and structural costs (minimum weight and dimensions ).
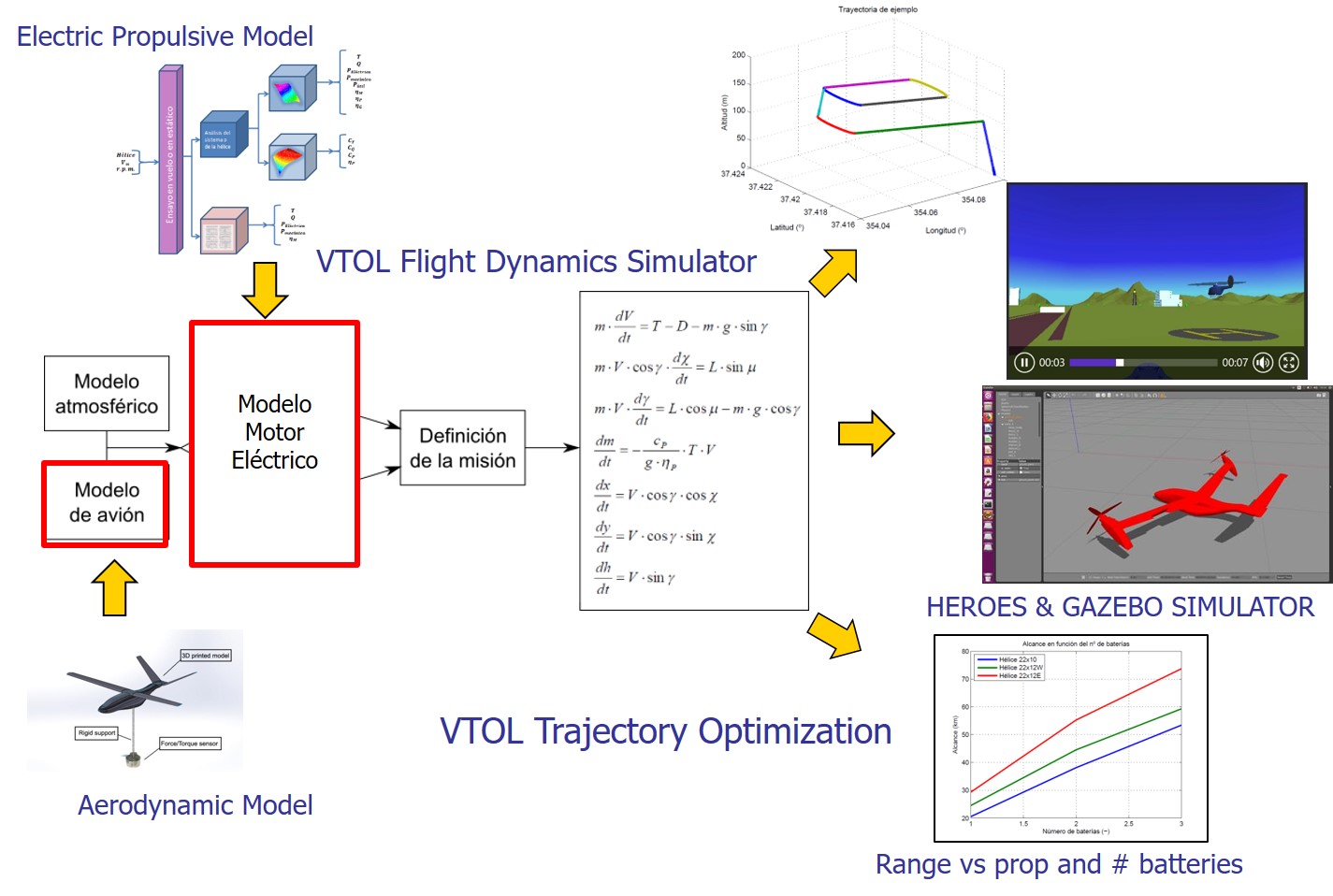
- T8.2. Development of simulation models: development of the dynamic models of each of the subsystems that integrate the aircraft that collect the overall behavior of the same during the different phases of flight, placing special emphasis on the most critical stages, such as the transition between helicopter-airplane modes and vice versa, or low-speed flight, etc. The modeling will be fed back from the information obtained in all the previous design working packages.
- T8.3. Integration of systems and functional tests: To verify the correct integration, test plans will be developed that verify the requirements, giving rise to a memory of specifications and tests carried out, which will be essential to demonstrate the safe operation of the aircraft and thus obtain future authorization to conduct actual flight tests.
- T8.4. Development of a HIL simulation platform: Development of a HIL simulation platform that models the behavior of the real aircraft during the execution of missions, so that the behavior of the entire embedded control and guiding algorithms. The development will focus mainly on the results obtained in the flight mechanics working package.
- T8.5. Bank Trial Campaign: Once completed the previous tasks, an exhaustive campaign of bench trials in the HIL environment will be carried out. The results obtained in this tests will serve to define the protocols of the flight tests that will be developed in Phase II of design.
Feasibility and Contingency Plan:
- The work team has considerable experience in the development and launching of unmanned aircraft.
- It should be noted that the work team has experience in the development of HIL simulation platforms, having already built a simulation of this type (available in the Department of Aerospace Engineering of the US).
- There is also experience of developing a test bench for brushless electric motors and DC / DC converters.
- As described in WP4, the HEROES tool will facilitate the simulation of the flight mechanics of rotary wing aircraft and wind turbines that will be the angular basis for the development of the HIL simulator. Researchers LBB and GVR have also developed an HIL that will serve to minimize the risks of designing a single HIL simulator
Available Materials:
- In addition to the aforementioned wind tunnel (which will validate the modes of transition between modes and loss of entry), the US Department of Aerospace Engineering has three unmanned aircraft (two of them prototypes designed by the work team) equipped with all the electronics and instrumentation necessary to carry out in-flight tests. In addition, Professor GVR has in Brazil two tilt-rotor RPASs that can also be used as additional test banks to evaluate the control strategies in the transition phases.
Publications:
Thesis
- Projeto da Arquitetura de Software Embarcado de um Veículo Aéreo Não Tripulado. Fernando Silvano Gonçalves, 2014. Dissertação (Mestrado em Pós-Graduação em Engenharia de Automação e Sistema) - Universidade Federal de Santa Catarina, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior. Advisor: Guilherme Vianna Raffo.
Congress
- "Assessing the use of Simulink on the Development Process of an Unmanned Aerial Vehicle," GONCALVES, F. S. ; DONADEL, R. ; BECKER, L. B. ; RAFFO, G. V. In: Workshop on Design, Modeling and Evaluation of Cyber Physical Systems, 2013, Philadelphia. 3th Workshop on Design, Modeling and Evaluation of Cyber Physical Systems (CyPhy'13), 2013. p. 1-6.
- "Wireless Communication Infrastructure for a Short-Range Unmanned Aerial," BODANESE, J.P. ; ARAUJO, G.M. DE ; STEUP, C. ; RAFFO, G.V. ; BECKER, L.B. In: 2014 28th International Conference on Advanced Information Networking and Applications Workshops (WAINA), 2014, BC. 2014 28th International Conference on Advanced Information Networking and Applications Workshops. p. 492-497.
- "RBESP: Reliable and best effort stack protocol for UAV collaboration with WSN,"BODANESE, J. P. ; DE ARAUJO, G. M. ; RAFFO, G. V. ; BECKER, L. B. In: 2014 12th IEEE International Conference on Industrial Informatics (INDIN), 2014, Porto Alegre RS. 2014 12th IEEE International Conference on Industrial Informatics (INDIN). p. 382-387"VANT Autônomo Capaz de Comunicar com uma Rede de Sensores Sem Fio," GONCALVES, F.S. ; ANDRADE, R. ; WOYAKEWICZ, V. ; PEREIRA, P. J. ; BECKER, L.B. ; RAFFO, G.V. . In: X Congresso Brasileiro de Agroinformática - SBIAgro, 2015, 2015, Ponta Grossa. X Congresso Brasileiro de Agroinformática - SBIAgro, 2015, 2015. p. 1-11. .
- "DESENVOLVIMENTO DE UM AMBIENTE DE SIMULAÇÃO DE VANTS TILT-ROTOR PARA TESTES DE ESTRATÉGIAS DE CONTROLE," LARA, A. V. ; REGO, B. S. ; RAFFO, G.V. ; ARIAS, J. In: XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017, Porto Alegre. XIII Simpósio Brasileiro de Automação Inteligente (SBAI), 2017. p. 1-7
- " Hardware-in-the-loop simulation environment for testing of tilt-rotor UAV's control strategies," LARA, A. V.; NASCIMENTO, I. B. P.; ARIAS, J.; BECKER, L. B.; RAFFO, G.V. In: XXII Congresso Brasileiro de Automática - CBA2018, 2018, João Pessoa. XXII Congresso Brasileiro de Automática. , 2018. p.1 - 7
SIMULATOR PRELIMINARY ARCHITECTURE
GAZEBO


HEROES

© 2018 Sergio Esteban Roncero: contact sesteban@us.es